Planetenforschung: Innovative Marsrover schwimmen im Sand
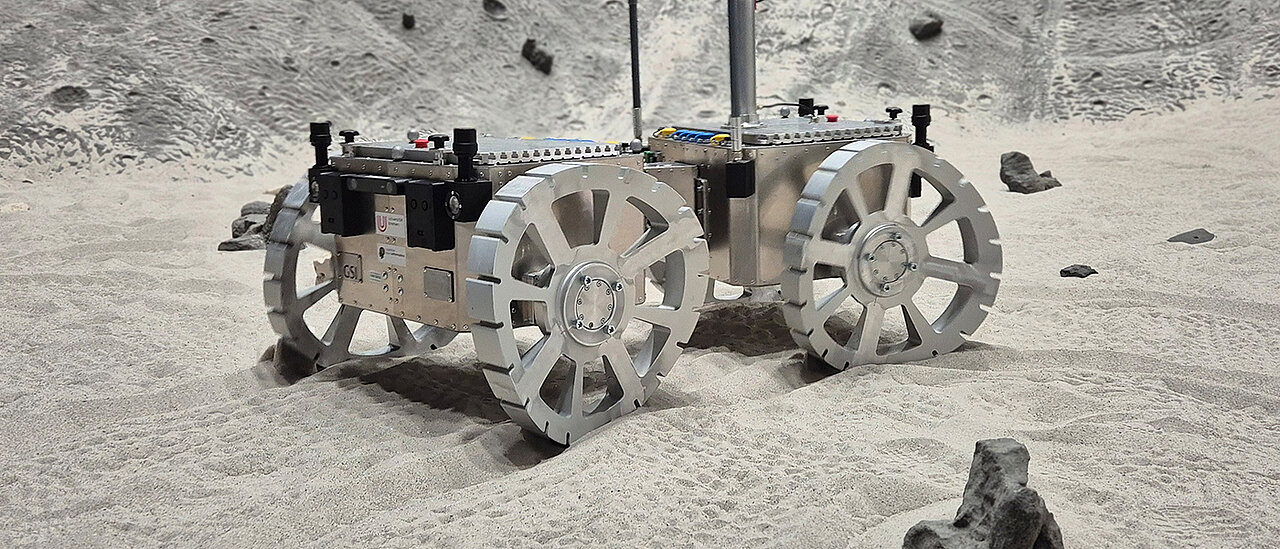
19.05.2026Nach dem Vorbild der Natur haben Forschende aus Würzburg und Bremen einen neuen Marsrover entwickelt. Seine Räder rollen nicht, sie machen Schwimmbewegungen.
Manche Tiere können sich effizient unter körnigen Oberflächen fortbewegen. Dazu gehört der Sandfisch (Scincus scincus), eine in der Sahara lebende Eidechse: Sie kann sich eingraben und dann regelrecht durch den Wüstensand „schwimmen“, um zu jagen oder um Raubtieren zu entkommen.
Die Bewegungsprinzipien, die dieser Fähigkeit zu Grunde liegen, sind erst seit wenigen Jahren verstanden. Eine Forschungsgruppe der Universität Würzburg hat nun den Fortbewegungsmechanismus des Sandfisches in eine erste technische Lösung umgesetzt – in einen innovativen Marsrover, der anderen Modellen bei der Fortbewegung auf Sand überlegen ist (Video am Ende des Textes).
Das Team des Informatikers Marco Schmidt, Leiter der Professur für eingebettete Systeme und Sensoren für die Erdbeobachtung (ESSEO), kooperiert dabei mit Forschenden aus Bremen. Das Projekt ist Teil der Initiative VaMEx des Deutschen Zentrums für Luft- und Raumfahrt.
Von der Biologie inspiriert: Rover mit innovativen Rädern
Bei Einsätzen auf dem Mars müssen Rover mit Sand, Geröll, Hängen und einem generell uneinheitlichen Gelände klarkommen und dabei ihre Mobilität, Stabilität und Effizienz erhalten. „Herkömmliche Radkonstruktionen sind oft für das Fahren bei niedrigen Geschwindigkeiten optimiert und neigen dazu, auf weichem Boden zu rutschen, einzusinken oder stecken zu bleiben“, sagt Amenosis Lopez, ein Forscher in der Arbeitsgruppe von Professor Schmidt.
Inspiriert vom Sandfisch, entwickelte das Team um den Würzburger Professor darum neuartige Räder für den Marsrover, die nicht rollen, sondern wie die Eidechse im Sand schwimmen: „Die Räder imitieren die charakteristische Wechselwirkung des Tiers mit dem Boden, wobei sowohl Längs- als auch Querkräfte erzeugt werden. Der Rover hinterlässt im Sand sinusförmige Spuren – das bestätigt, dass der beabsichtigte Schwimmmechanismus erreicht ist.“
Experimentelle Validierung und weitere Verbesserung
Schmidts Gruppe hat den Rover in Kooperation mit dem Deutschen Forschungszentrum für Künstliche Intelligenz (DFKI) Bremen und der Universität Bremen auf Sand und im Freiland getestet. Die Ergebnisse zeigten, dass sich das Fahrzeug stabil auf Sand fortbewegt.
„Die Experimente haben uns auch klare Anhaltspunkte für Verbesserungen geliefert“, sagt der Würzburger Professor. Die ersten Sandfisch-Räder waren schwerer und schmaler als pneumatische Vergleichsräder. Das erhöhte den Druck auf den Untergrund und das Einsinken des Rovers. Es kam zu einer Kopplung von Schlupf und Einsinken, was die Steuerbarkeit verschlechterte.
Diese Effekte ließen sich durch eine Verbesserung des Designs beheben: Eine Vergrößerung der Radbreite und eine Verringerung der Masse senkten den Bodendruck und reduzierten den Schlupf. Stabilität und Steuerbarkeit des Rovers verbesserten sich. „Weitere Verfeinerungen der Radoberfläche dürften die Leistung auf gemischtem Gelände weiter verbessern“, so die Prognose der Forschenden.
Über die Hardware hinaus: hin zu intelligenter Mobilität
Neben der Hardwareentwicklung zielt das ESSEO-Team darauf ab, seinen Beitrag zu VaMEx in Richtung softwaregesteuerter Mobilität auszuweiten.
Dazu plant es die Entwicklung von Steuerungsstrategien, die Rutschen, Einsinken und die Wechselwirkung zwischen Gelände und Rad explizit berücksichtigen und so ein stabileres und anpassungsfähigeres Verhalten des Rovers in körnigen Umgebungen ermöglichen.
Kontakt
Prof. Dr. Marco Schmidt, Institut für Informatik, Professur für eingebettete Systeme und Sensoren für die Erdbeobachtung, marco.schmidt@uni-wuerzburg.de
Manuel Meder, Deutsches Forschungszentrum für Künstliche Intelligenz (DFKI) Bremen, manuel.meder@dfki.de
Die VaMEx-Initiative
VaMEx ist ein Kürzel für „Valles Marineris Explorer“. Dahinter steht eine Initiative der Deutschen Raumfahrtagentur im Deutschen Zentrum für Luft- und Raumfahrt (DLR). Die beteiligten Forschungsgruppen entwickeln Schlüsseltechnologien für Schwärme von fahrenden, laufenden und fliegenden Robotern, die auf dem Mars die Schluchten und Höhlen eines gewaltigen Tals erkunden sollen, des „Valles Marineris“. Dabei wird auch nach Spuren von flüssigem Wasser gesucht, das in geschützten Nischen existieren könnte und eine Voraussetzung für Leben wäre. Von der Universität Würzburg sind an VaMEx auch Raumfahrt-Teams der Professoren Hakan Kayal und Guido Dietl intensiv beteiligt.