Planetary research: Innovative Mars rovers ‘swim’ through the sand
05/19/2026Taking inspiration from nature, researchers from Würzburg and Bremen have developed a new Mars rover. Its wheels do not roll; they make swimming motions.
Some animals can move efficiently beneath granular surfaces. These include the sandfish (Scincus scincus), a lizard native to the Sahara: it can burrow into the sand and then literally ‘swim’ through the desert sand to hunt or escape predators.
The principles of movement underlying this ability have only been understood for a few years. Researchers at the University of Würzburg have now translated the sandfish’s locomotion mechanism into an initial technical solution – an innovative Mars rover that outperforms other models when moving on sand (video at the end of the text).
The team led by computer scientist Marco Schmidt, Professor for Embedded Systems and Sensors for Earth Observation (ESSEO), is collaborating with researchers from Bremen. The project is part of the VaMEx initiative of the German Aerospace Centre.
Inspired by biology: rover with innovative wheels
During missions on Mars, rovers must cope with sand, scree, slopes and generally uneven terrain whilst maintaining their mobility, stability and efficiency. “Conventional wheel designs are often optimised for driving at low speeds and tend to slip, sink or get stuck on soft ground”, says Amenosis Lopez, a researcher working with Professor Schmidt.
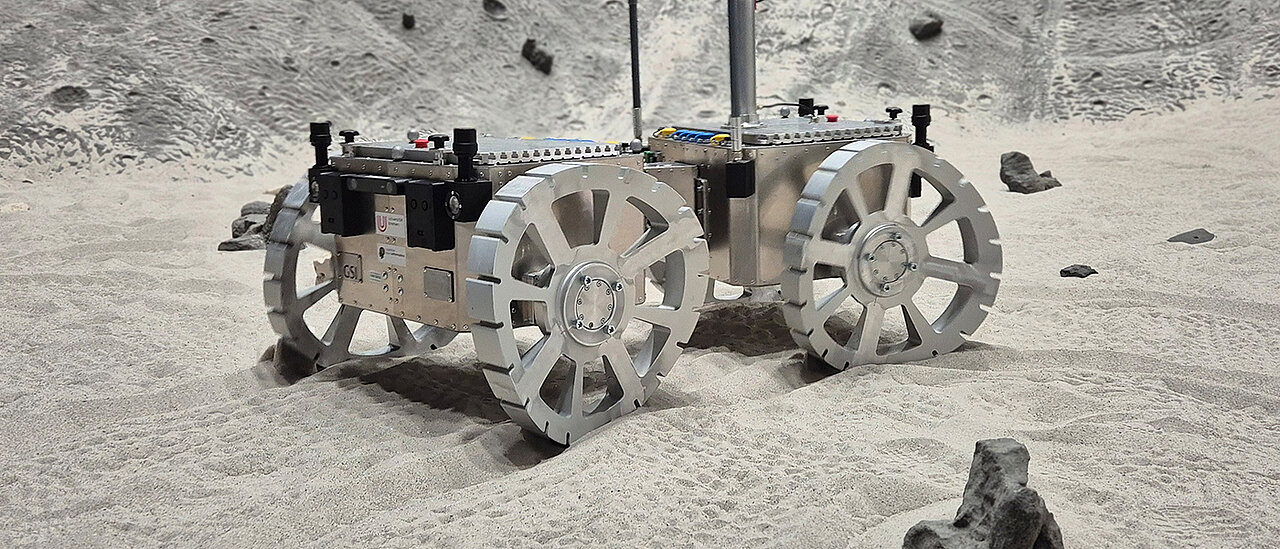
Inspired by the sandfish lizard, the team led by the Würzburg professor therefore developed novel wheels for the Mars rover that do not roll but “swim” through the sand like the lizard: “The wheels mimic the animal’s characteristic interaction with the ground, generating both longitudinal and lateral forces. The rover leaves sinusoidal tracks in the sand – this confirms that the intended swimming mechanism has been achieved.”
Experimental validation and further improvement
Schmidt’s group tested the rover on sand and in an open field in cooperation with the German Research Center for Artificial Intelligence (DFKI) in Bremen and the University of Bremen. The results showed that the vehicle moves stably on sand.
“The experiments also provided us with clear pointers for improvements,” says the Würzburg professor. The first Sandfish wheels were heavier and narrower than comparable pneumatic wheels. This increased the pressure on the ground and caused the rover to sink. A coupling of slippage and sinking occurred, which impaired controllability.
These effects were remedied by improving the design: increasing the wheel width and reducing the mass lowered the ground pressure and reduced slippage. The rover’s stability and controllability improved. “Further refinements to the wheel surface are likely to further improve performance on mixed terrain,” the researchers predict.
Beyond the hardware: towards intelligent mobility
In addition to hardware development, the ESSEO team aims to expand its contribution to VaMEx towards software-controlled mobility.
To this end, it plans to develop control strategies that explicitly account for slipping, sinking and the interaction between terrain and wheel, thereby enabling more stable and adaptive behaviour of the rover in granular environments.
Contact
Prof Dr Marco Schmidt, Institute of Computer Science, Embedded Systems and Sensors for Earth Observation, marco.schmidt@uni-wuerzburg.de
Manuel Meder, German Research Center for Artificial Intelligence (DFKI) Bremen, manuel.meder@dfki.de
The VaMEx initiative
VaMEx is an acronym for “Valles Marineris Explorer”. It is an initiative of the German Space Agency at the German Aerospace Centre (DLR). The participating research groups are developing key technologies for swarms of driving, walking and flying robots designed to explore the gorges and caves of a vast valley on Mars, the ‘Valles Marineris’. The mission will also search for traces of liquid water, which could exist in sheltered niches and would be a prerequisite for life. From the University of Würzburg, space teams led by Professors Hakan Kayal and Guido Dietl are also closely involved in VaMEx.